int mkfifo(const char *path, mode_t mode);
int mkfifoat(int fd, const char *path, mode_t mode);
```
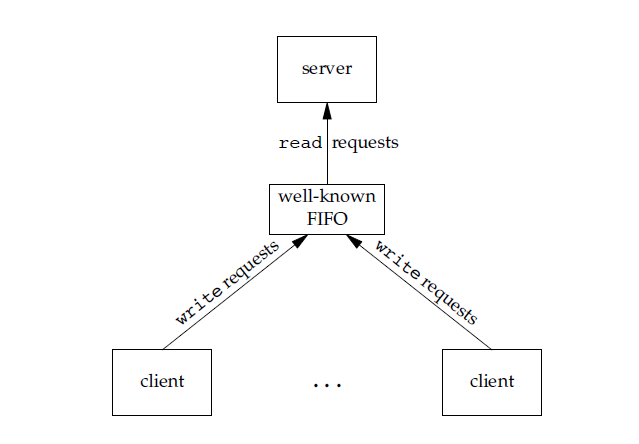
FIFO 常用于客户-服务器应用程序中,FIFO 用作汇聚点,在客户进程和服务器进程之间传递数据。
## 3. 消息队列
相比于 FIFO,消息队列具有以下优点:
- 消息队列可以独立于读写进程存在,从而避免了 FIFO 中同步管道的打开和关闭时可能产生的困难;
- 避免了 FIFO 的同步阻塞问题,不需要进程自己提供同步方法;
- 读进程可以根据消息类型有选择地接收消息,而不像 FIFO 那样只能默认地接收。
## 4. 信号量
它是一个计数器,用于为多个进程提供对共享数据对象的访问。
## 5. 共享存储
允许多个进程共享一个给定的存储区。因为数据不需要在进程之间复制,所以这是最快的一种 IPC。
需要使用信号量用来同步对共享存储的访问。
多个进程可以将同一个文件映射到它们的地址空间从而实现共享内存。另外 XSI 共享内存不是使用文件,而是使用内存的匿名段。
## 6. 套接字
与其它通信机制不同的是,它可用于不同机器间的进程通信。
🎨️欢迎关注我的公众号 CyC2018,在公众号后台回复关键字 **资料** 可领取复习大纲,这份大纲是我花了一整年时间整理的面试知识点列表,不仅系统整理了面试知识点,而且标注了各个知识点的重要程度,从而帮你理清多而杂的面试知识点。可以说我基本是按照这份大纲来进行复习的,这份大纲对我拿到了 BAT 头条等 Offer 起到很大的帮助。你们完全可以和我一样根据大纲上列的知识点来进行复习,就不用看很多不重要的内容,也可以知道哪些内容很重要从而多安排一些复习时间。